Language-Guided Pattern Formation for Swarm Robotics with Multi-Agent Reinforcement Learning
本論文提出一個名為 LGPF(語言引導之圖樣形成)的新框架,利用大型語言模型(LLM)將自然語言描述轉換為集群機器人需排列成的圖樣。
本論文提出一個名為 LGPF(語言引導之圖樣形成)的新框架,利用大型語言模型(LLM)將自然語言描述轉換為集群機器人需排列成的圖樣。
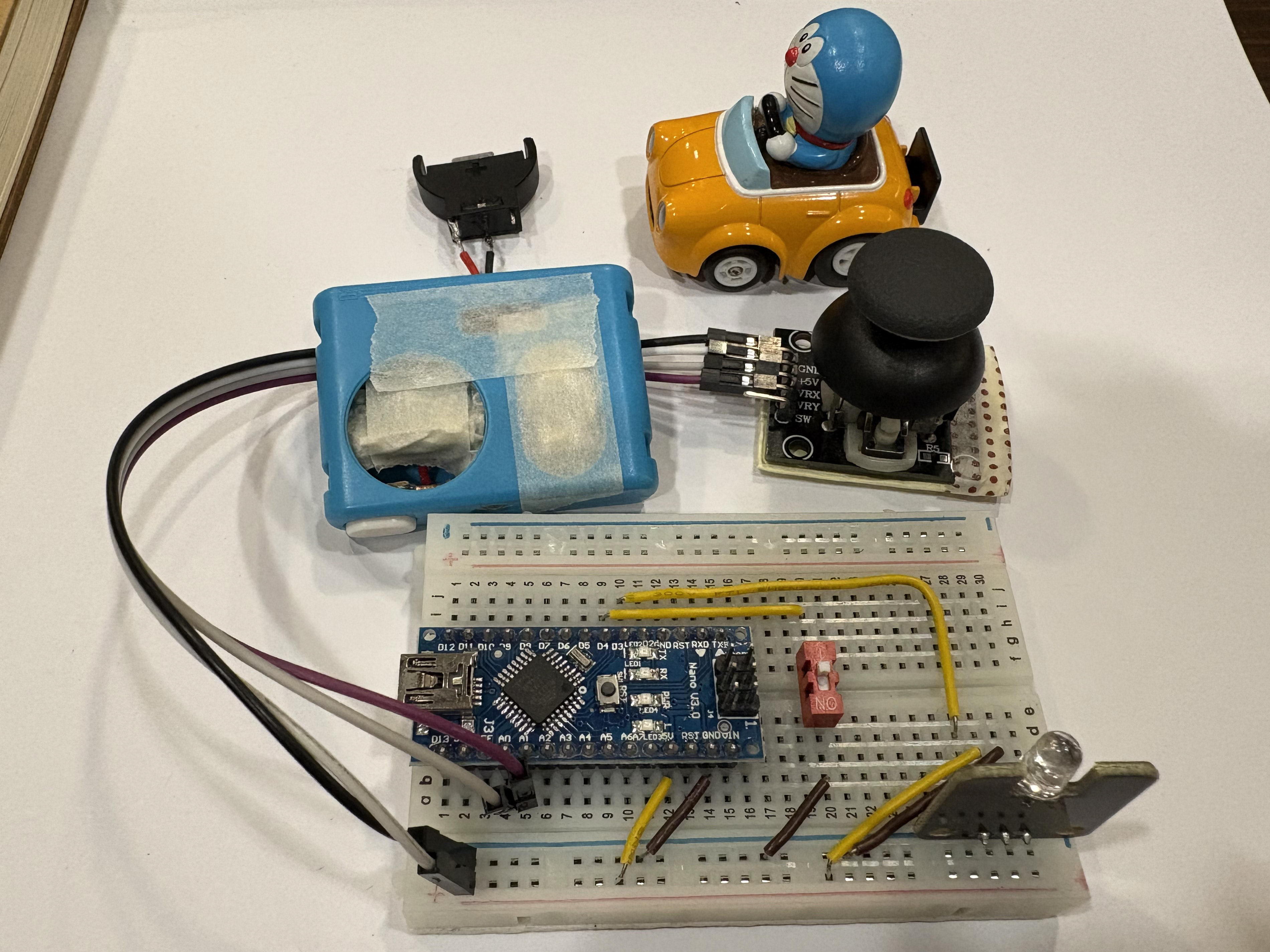
使用 Arduino 實作 Q-steer 系列遙控車的遙控器。

自動填寫 NTHU 校務系統之驗證碼。
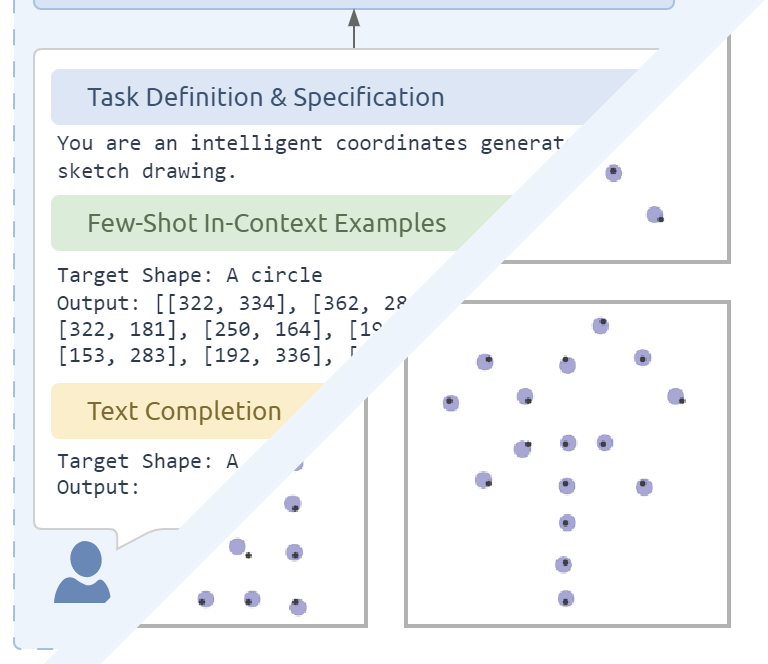
本論文提出一個名為 LGPF(語言引導之圖樣形成)的新框架,利用大型語言模型(LLM)將自然語言描述轉換為集群機器人需排列成的圖樣。該系統結合了圖樣形成與多智能強化學習(MARL),使機器人在無需直接通訊的情況下協調行動並避免碰撞。透過模擬與實體實驗驗證,LGPF 能夠準確且安全地生成各種使用者指定的複雜圖樣。
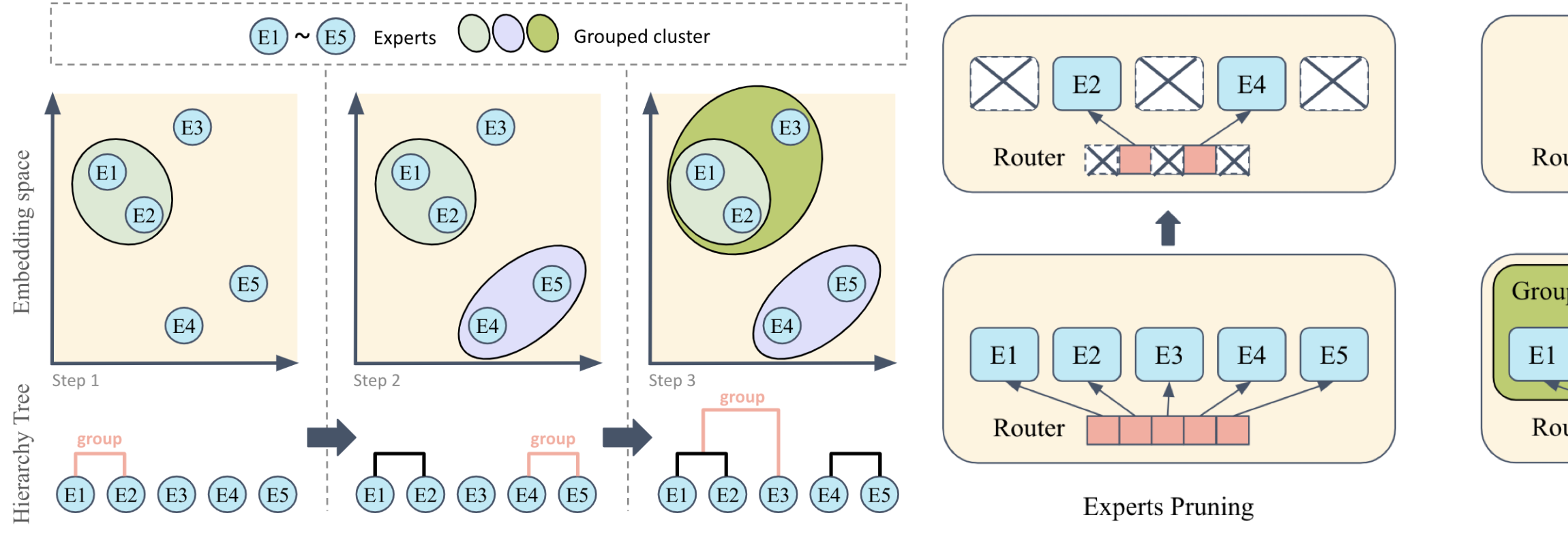
To address the high memory demands of Sparse Mixture-of-Experts (SMoE) models caused by numerous expert components, we introduces Hierarchical Clustering for Sparsely activated Mixture of Experts (HC-SMoE), a task-agnostic expert merging framework for parameter reduction without retraining. HC-SMoE introduces a novel hierarchical clustering approach based on expert outputs to ensure merging robustness independent of routing decisions. The proposed output-based clustering method enables effective capture of functional relationships between experts for large-scale architectures. We provide theoretical analysis and comprehensive evaluations across multiple zero-shot language tasks to demonstrate HC-SMoE's effectiveness in state-of-the-art models including Qwen and Mixtral.
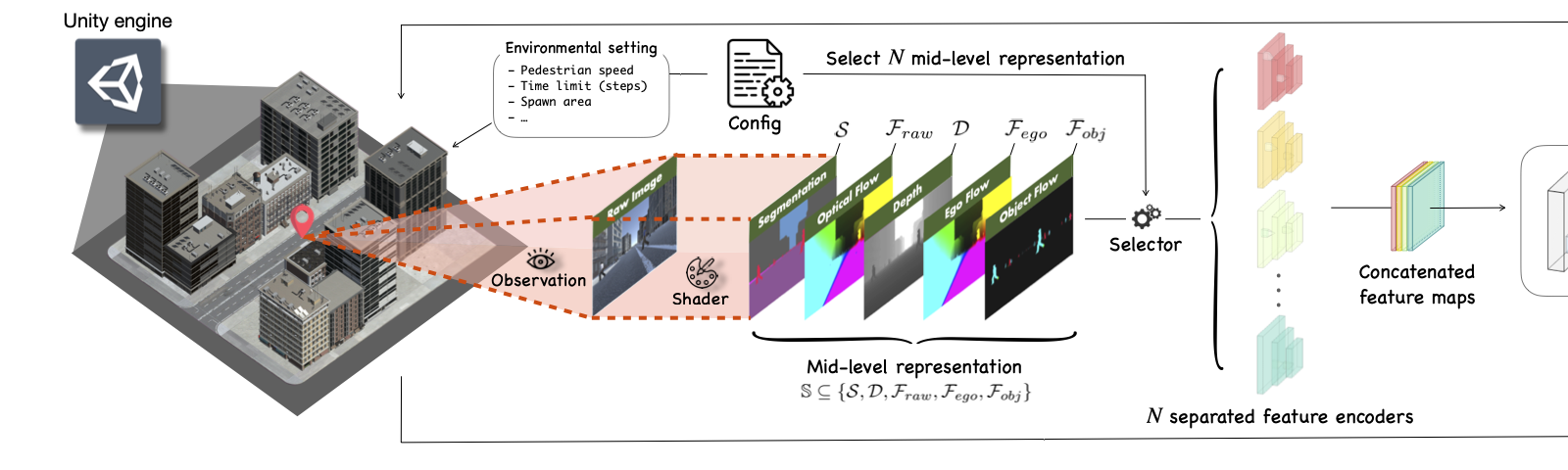
We introduce a new concept of incorporating factorized flow maps as mid-level representations, for bridging the perception and the control modules in modular learning based robotic frameworks. To investigate the advantages of factorized flow maps and examine their interplay with the other types of mid-level representations, we develop a framework with four different environments that contain both static and dynamic objects, for analyzing the impacts of factorized optical flow maps on the performance of deep reinforcement learning agents.
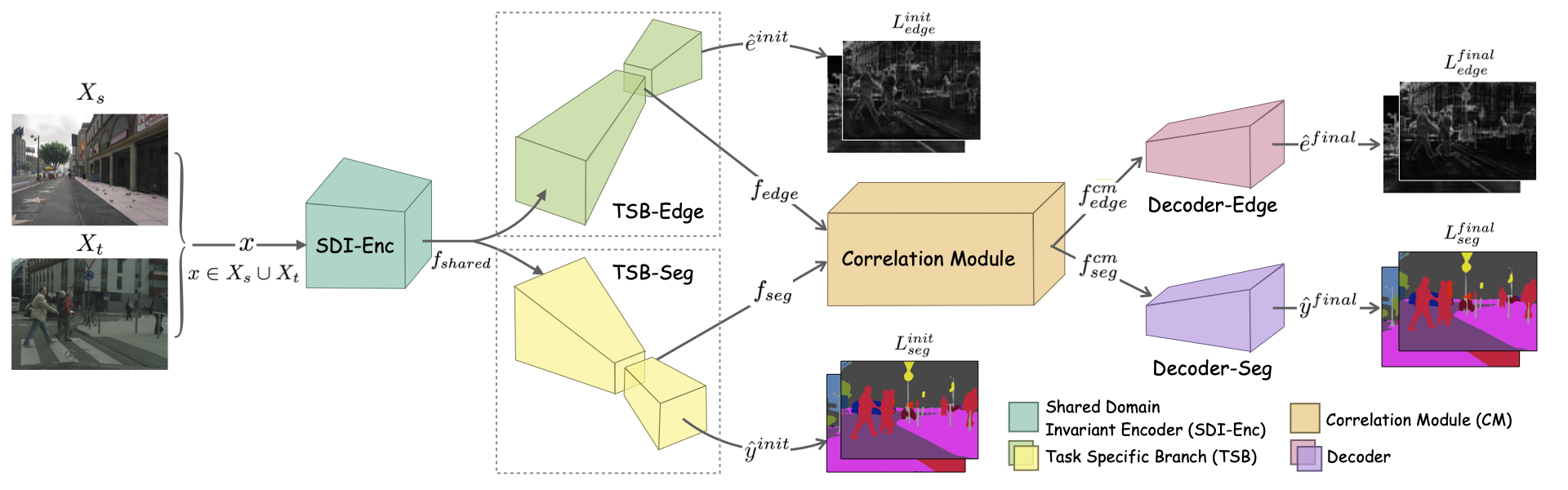
We introduce Edge Learning based Domain Adaptation (ELDA), a novel unsupervised domain adaptation (UDA) framework which incorporates edge information into its training process to serve as a type of domain invariant information. In our experiments, we quantitatively and qualitatively demonstrate that the incorporation of edge information is indeed beneficial and effective, as it enables ELDA to outperform the contemporary state-of-the-art methods on benchmarks for semantic segmentation based UDA tasks.
將 UDA 應用在自駕車駕駛上,讓強化學習智慧代理人(Agent)能在虛擬環境中學習,並直接轉移至真實世界中執行任務。
使用 Arduino 實作 Q-steer 系列遙控車的遙控器。
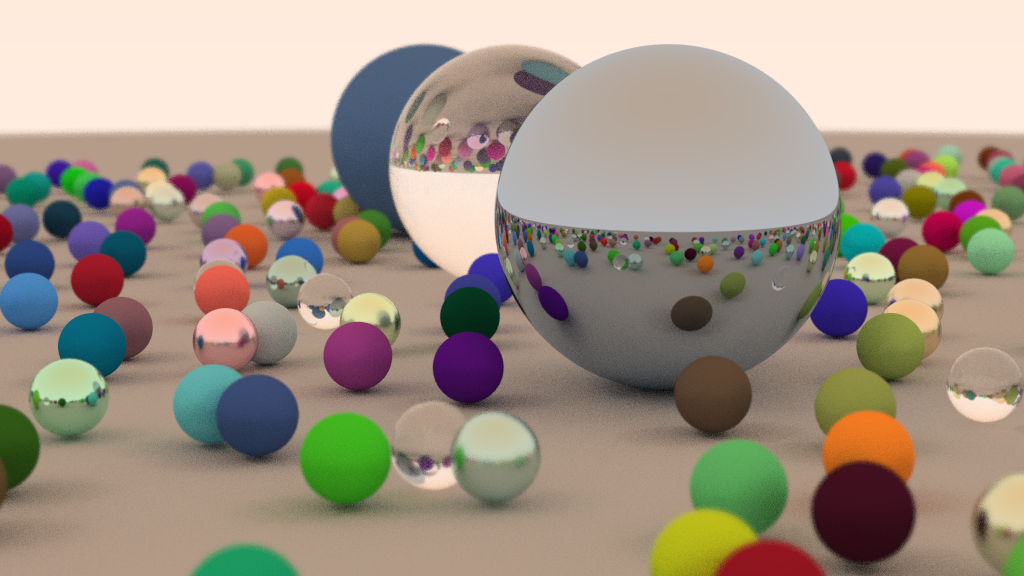
使用 CUDA 實作平行化版本的光線追蹤(Ray Tracing)演算法。

使用 OpenGL 開發的室內場景渲染專案,其中實作了各類光源、FXAA 抗鋸齒,以及非真實感繪製(Non-photorealistic rendering)等多種渲染技術。 另外,使用者可透過程式提供的 UI 來調整埸景的渲染設定。
利用機器學習技術進行光學字元辨識(OCR),自動填寫 NTHU 校務系統之驗證碼。

使用生成對抗網路(DCGAN)依據人們的臉部照片産生對應的聲音。

從無到有一手打造的部落格,佈景主題完全由本人設計。

NTHU 課程心得交流平台
你能五關全過嗎?用 C 語言開發的像素風彈幕遊戲。
四則運算 X 卡牌遊戲